Kröning Automation
High Performance - Pick & Place.

Was wäre ein Roboter ohne das Auge der Bildverarbeitung?
Damit der Roboter sehen kann, liefert das Bildverarbeitungssystem genaue Informationen zur Position der erkannten Teile, und das Hand-in-Hand - synchronisiert über Echtzeit-Ausgänge und schneller Datenübertragung mittels modernster industriestandardisierter Schnittstellen.

Mit einem Teiledurchsatz von bis zu 200 Teilen pro Bild und bei einer Bildwiederholrate von bis zu 25 Bildern/Minute stellt das Projekt höchste Anforderungen an die eingesetzte Hardware und die verwendete Algorithmik. Der Einsatz des derzeit leistungsstärksten Keyence-Controllers der XG-Serie in Verbindung mit Highspeed-Zeilenkameras und der eigens durch proksys entwickelten Prüf- und Erkennungssoftware liefert die Antwort zur Lösung dieser High-Performance Anwendung.

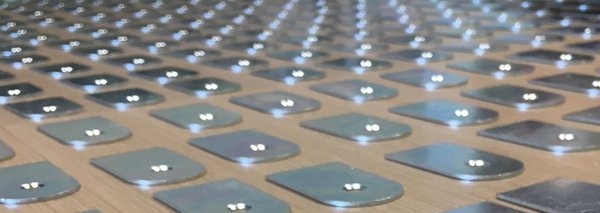
Mit einem Umfang von fast 100 verschiedenen Teiletypen und zudem unterschiedlichen Oberflächenbeschichtungen stellt das Projekt höchste Anforderungen an das Grundkonzept, die Beleuchtungs-, Kamera- und Optikkomponenten sowie deren Justage und gemeinsames Zusammenspiel. Individuelle typ-spezifische Parameter und Einstellungen sind durch das ausgearbeitete Umsetzungskonzept gewährleistet. Damit gelang es proksys all diese unterschiedlichen Teiletypen und Varianten ohne aufwendiges Umrüsten mit einem Bildverarbeitungssetup abzubilden.

Bis an die physikalischen Grenzen…
Durch den Einsatz eines durchdachten Kalibrierkonzeptes sind wir in der Lage drei Zeilenkameras mit drei Robotern zu synchronisieren. Zudem werden optische Effekte durch die Kalibrierung kompensiert und damit eine hohe Erkennungsrate gewährleistet.